Spike Prime – Lesson 14
Competition Ready 3/8
Σε αυτό το κεφάλαιο οι μαθητές θα έρθουν σε επαφή με τον κόσμο των ρομποτικών διαγωνισμών καθώς σταδιακά θα εκπαιδευτούν στα βασικά τμήματα της κατασκευής και του προγραμματισμού αυτόνομων ρομπότ που χρησιμοποιούν αισθητήρες. Θα συνεργαστούν αρχικά με σκοπό την κατασκευή ενός αποτελεσματικού διαγωνιστικού ρομπότ και έπειτα για το συστηματικό έλεγχο και την βελτίωση προγραμμάτων αξιοποιώντας την διαδικασία σχεδιασμού έτσι ώστε να αναπτύξουν μια λύση με σκοπό να ολοκληρώσουν κάποιους στόχους. Καθ’ όλη την διάρκεια του κεφαλαίου οι μαθητές θα αναπτύξουν δεξιότητες που σχετίζονται με την συνεργασία καθώς και δεξιότητες ζωής που θα αποτελέσουν εφόδιο για την μελλοντική τους επαγγελματική σταδιοδρομία.
Σκοπός του μαθήματος είναι οι μαθητές να:
Οι μαθητές μέσω του μαθήματος θα εκπαιδευτούν:
- Στον προγραμματισμό του βασικού μοντέλου οδήγησης ώστε να σταματάει όταν εντοπίζει μια μαύρη γραμμή.
- Στον προγραμματισμό του βασικού μοντέλου οδήγησης ώστε να ακολουθεί μια μαύρη γραμμή.
Βρες την σωστή γραμμή
- Είναι σχετικά εύκολο να κερδίσεις έναν αγώνα αυτοκινήτων. Αυτό που χρειάζεται είναι να είσαι ο ταχύτερος και να παραμείνεις μέσα στην λωρίδα σου.
- Θα βοηθούσε αν μπορούσες να ακολουθήσεις μια γραμμή;
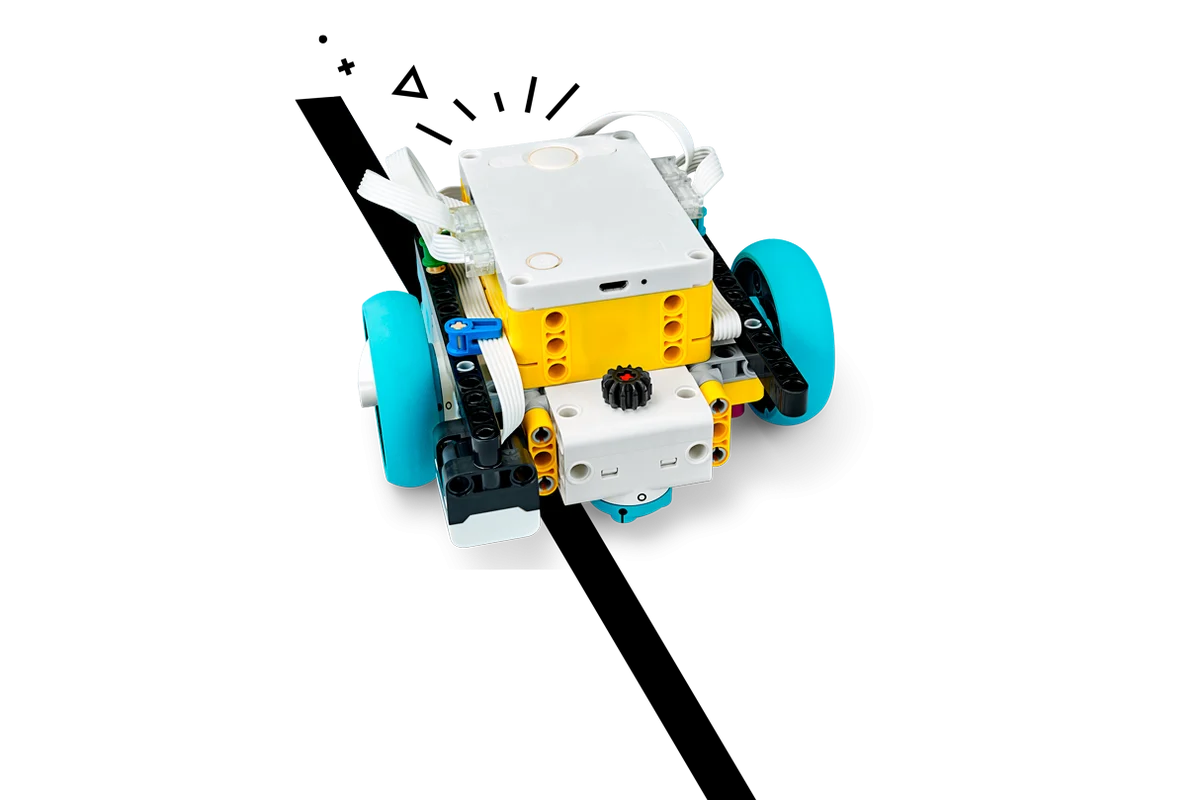
Κατασκεύασε το βασικό μοντέλο οδήγησης προσθέτοντας τον αισθητήρα χρώματος
Πάμε να τα καταφέρουμε!!
Οδήγα και σταματά όταν εντοπίσεις μια γραμμή

Εκτέλεσε το πρώτο τμήμα κώδικα και περιέγραψε τι παρατηρείς.
Το πρώτο πρόγραμμα όταν εκτελεστεί θα δώσει εντολή στο βασικό μοντέλο οδήγησης να σταματήσει σε μια γραμμή που θα είναι κάθετη προς την κατεύθυνση την οποία κινείται το ρομπότ. Αυτή η γραμμή:
- Να σχεδιαστεί στο τραπέζι
- Να σχεδιαστεί σε ένα κομμάτι χαρτί
- Να είναι ο μπροστινός άξονας του ρομπότ
Οδήγα ακολουθώντας την γραμμή
Εκτέλεσε το δεύτερο τμήμα κώδικα και περιέγραψε τι παρατηρείς.
- Όταν ο αισθητήρας χρώματος εντοπίσει την άκρη της μαύρης γραμμής, το ρομπότ στρίβει προς την κατεύθυνση του λευκού πλαισίου.
- Όταν ο αισθητήρας χρώματος εντοπίσει το λευκό πλαίσιο, το ρομπότ στρίβει προς την άλλη κατεύθυνση προς την άκρη της μαύρης γραμμής.
- Επανέλαβε αυτές τις δυο ενέργειας επ’ άπειρον
- Ίσως να παρατήρησες ότι χρησιμοποιούμε την λειτουργία ενέργειας για να ανοίγουμε και να κλείνουμε τους κινητήρες. Γνωρίζεις γιατί το κάναμε αυτό;
- Το βασικό μοντέλο οδήγησης πρέπει να είναι σε θέση να εκτελέσει έναν συνδυασμό μικρών και γρήγορων κινήσεων (πιθανόν κάτω από 10 μοίρες κάθε φορά μεταξύ του λευκού και του μαύρου πλαισίου). Αξιοποιώντας την λειτουργία ενέργειας δημιουργούμε ένα πιο αντιδραστικό και ακριβές πρόγραμμα έτσι ώστε το ρομπότ να ακολουθεί με μεγαλύτερη ακρίβεια την γραμμή.
Βελτιστοποίησε ως προς την ταχύτητα το πρόγραμμα σου
- Υπάρχουν πολλοί τρόποι για να κανείς ένα γρήγορο ρομπότ που να ακολουθεί την γραμμή
- Οργάνωσε έναν αγώνα ταχύτητας για να δεις το ρομπότ ποιας ομάδας είναι το ταχύτερο.
Πρόσθεσε την εντολή ΄ IF / ELSE ΄ για να επιταχύνεις την εκτέλεση του προγράμματος.
Συνέχισε να εξερευνείς προγράμματα ακολούθησης γραμμών. Θα εκπλαγείς με το ποσό πολύ μπορείς να βελτιώσεις την ταχύτητα του ρομπότ σου !!
Το πρόγραμμα σου μπορεί να είναι ως εξής:

Πως τα πήγες;
Τι έκανες καλά; Υπήρχε κάτι το οποίο πιστεύεις ότι θα μπορούσες να κάνεις καλύτερα;
Εξαιρετικά! Τώρα είσαι σε θέση να οδηγήσεις το ρομπότ σου σε κάθε αγωνιστικό χώρο