Crazy Carnival Games – Lesson 5, Part 5/7
Avoid the Edge
Μπορεί η ομάδα να προγραμματίσει ένα ρομπότ ώστε να κινείται σε μια επιφάνεια χωρίς να πέσει από τις άκρες;
Σε αυτή τη δραστηριότητα, οι μαθητές σχεδιάζουν και προγραμματίζουν ένα ρομπότ που κινείται σε μια επιφάνεια και αποφεύγει να πέσει από τις άκρες. Εξερευνούν έννοιες όπως η ανίχνευση επιφανειών, η αντίδραση σε αισθητήρες και η ασφαλής πλοήγηση, δοκιμάζουν διαφορετικές λύσεις και αξιολογούν ποια είναι η πιο αποτελεσματική.
🎯 Στόχοι του μαθήματος
- Κατανόηση της χρήσης αισθητήρων για ανίχνευση άκρων
- Προγραμματισμός ρομπότ για ασφαλή πλοήγηση σε περιορισμένο χώρο
- Εφαρμογή της μεθόδου δοκιμής και βελτίωσης
- Ανάπτυξη δεξιοτήτων συνεργασίας και επίλυσης προβλημάτων
🔍 Εξερευνώ
- Παρουσιάζουμε την αποστολή: Η ομάδα πρέπει να προγραμματίσει ένα ρομπότ ώστε να κινείται σε μια επιφάνεια χωρίς να πέσει από τις άκρες.
- Συζητάμε στρατηγικές ανίχνευσης άκρων και αντίδρασης σε αισθητήρες.
- Οι μαθητές ξεκινούν να σχεδιάζουν τον προγραμματισμό του ρομπότ με βάση τα υλικά και τους αισθητήρες που διαθέτουν.
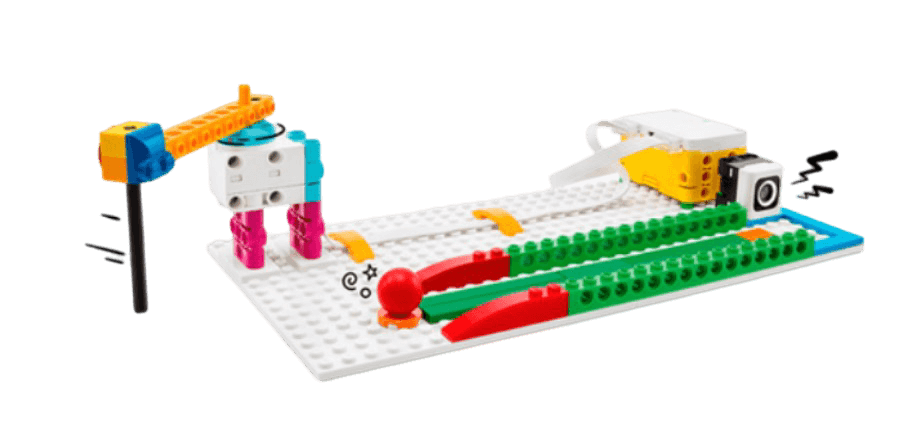
📸 Κατασκευή:
🛠️ Εξηγώ
- Οι μαθητές προγραμματίζουν το ρομπότ ώστε να ανιχνεύει τις άκρες της επιφάνειας και να αλλάζει κατεύθυνση για να μην πέσει.
- Δοκιμάζουν το μοντέλο και παρατηρούν πώς αντιδρά το ρομπότ όταν πλησιάζει τις άκρες.
- Συζητούν ποιο μέρος του προγραμματισμού επηρέασε το τελικό αποτέλεσμα.
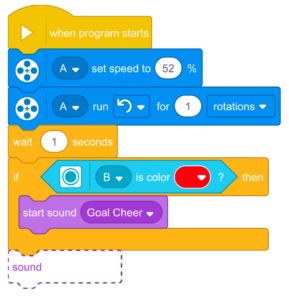
📸 Κώδικας:


💡 Εφαρμόζω
- Πραγματοποιούν επαναλαμβανόμενες δοκιμές και βελτιώσεις.
- Αλλάζουν παραμέτρους (π.χ. ευαισθησία αισθητήρων, ταχύτητα) για καλύτερη απόδοση.
- Συγκρίνουν τα αποτελέσματα και αναλύουν τι λειτούργησε καλύτερα.
🧠 Αξιολογώ
- Ποια επιλογή βελτίωσε την ικανότητα του ρομπότ να αποφεύγει τις άκρες;
- Τι δυσκολίες αντιμετωπίσατε και πώς τις ξεπεράσατε;
- Αν είχατε περισσότερο χρόνο, τι θα αλλάζατε στον προγραμματισμό σας;